Estimación de Emisiones de Fuentes de la Calidad del Aire
6.2 Estimación de emisiones de fuentes móviles en ruta
6.2.7 Determinación de patrones de conducción de los vehículos en ruta
6.2.7.1 Introducción
Una variable crítica en la determinación de emisiones vehiculares es la forma en que los vehículos son conducidos en una ubicación de interés. Los modelos MOBILE, EMFAC y COPERT utilizan velocidades de ruta promedio para establecer patrones de conducción. Los modelos MOVES, IVE y CMEM son más flexibles al incorporar la operación de vehículos al modelo y no necesitan descansar en un grupo definido de ciclos para estimar emisiones. En lugar de lo anterior, los datos de conducción real se utilizan para predecir emisiones, y se basan en parametrizaciones de conducción específicas más que en simples velocidades promedio. En este caso, obtener la información necesaria de patrones de conducción no siempre es una tarea simple. Es posible hacer una conexión a los sistemas computacionales del vehículo y registrar como conducen. Sin embargo, las interfaces a los sistemas computacionales de los vehículos no siempre son iguales y el equipo de monitoreo puede ser caro. Un enfoque alternativo es fijar un monitor al vehículo, como el sistema de posicionamiento global (GPS) de modo de registrar las velocidades del vehículo. De manera de obtener los datos requeridos para los modelos MOVES, IVE, Guía y CMEM, al menos los datos de velocidad por segundo y de altura deben ser registrados. Existen unidades GPS que registran datos varias veces por segundo, sin embargo no se ha verificado una mejora significativa en los datos sobre mediciones segundo a segundo.
 En estudios del ISSRC se han utilizado dos opciones para el registro de velocidades segundo a segundo. Una es fijar al parachoques un sensor óptico que determina la velocidad. La otra opción es utilizar sistemas de posicionamiento global satelital (GPS). En general, el sensor óptico ha probado ser el más confiable pero el GPS es también bastante preciso, más pequeño, fácil de usar y más barato. Por ello, la utilización del GPS es el enfoque más común para establecer patrones de conducción en ruta y velocidades promedio. La figura 6.2.7-1 compara resultados de una unidad de registro GPS con velocidades de conducción determinadas con un sistema de medición de velocidad en vehículos.
En estudios del ISSRC se han utilizado dos opciones para el registro de velocidades segundo a segundo. Una es fijar al parachoques un sensor óptico que determina la velocidad. La otra opción es utilizar sistemas de posicionamiento global satelital (GPS). En general, el sensor óptico ha probado ser el más confiable pero el GPS es también bastante preciso, más pequeño, fácil de usar y más barato. Por ello, la utilización del GPS es el enfoque más común para establecer patrones de conducción en ruta y velocidades promedio. La figura 6.2.7-1 compara resultados de una unidad de registro GPS con velocidades de conducción determinadas con un sistema de medición de velocidad en vehículos.
Como se puede observar en la figura 6.2.7-1, ambos sistemas de medición concuerdan bastante bien. Las principales diferencias ocurren a velocidades bajas las cuales no son tan importantes para la determinación de emisiones.
Al analizar datos de GPS, se debe considerar un problema que existe con el uso de estos dispositivos. Una unidad GPS puede perder contacto momentáneamente con los sistemas satelitales que permiten el registro de velocidad y ubicación. Esto puede ser causado por arboles, edificios o puede ocurrir sin ninguna razón aparente. Cuando estos eventos ocurren, la unidad GPS algunas veces continúa reportando la antigua velocidad hasta que se retoma la operación correcta o hasta que la velocidad reportada sea cero. En casos donde la velocidad se vuelve cero, se registra una gran desaceleración y luego aceleración del vehículo. Similarmente, cuando la unidad GPS mantiene una velocidad previa y posteriormente la unidad se corrige, se puede registrar una aceleración o desaceleración significativa. Estas aceleraciones y desaceleraciones erróneas pueden resultar en cálculos altamente positivos o negativos de demanda de potencia del vehículo. Debido a que son poco frecuentes, estas variaciones tienden a no influenciar las velocidades promedio a menos que sean pérdidas significativas de información. En el caso de necesitar velocidades segundo a segundo, los datos del GPS deben ser examinados por estos posibles eventos anómalos antes de que sean procesados. Este examen no siempre es fácil. Un enfoque inicial es marcar todas las aceleraciones y desaceleraciones grandes y revisar los datos en forma manual. Investigadores también han desarrollado Macros para examinar utilizando Excel y otros programas para ayudar a encontrar estos eventos anómalos.
El GPS también puede proveer información acerca de la altura, la cual teóricamente puede utilizarse para determinar la pendiente de la ruta en los casos de lomas significativas. Sin embargo, se requiere gran cuidado al utilizar datos para este propósito. Los datos de altura del GPS pueden perderse mucho más que los datos de velocidad. Por ello se debe tener aún más cuidado antes de utilizar datos de altura de GPS para estimar pendientes en rutas. Es mejor desarrollar algún tipo de programa de ajuste de curvas y recopilar múltiples datos de altura del GPS a lo largo de la ruta de interés para este propósito.
6.2.7.2 Potencia Específica Vehicular
Un parámetro importante de los vehículos que se utiliza en los modelos MOVES de la EPA de los Estados Unidos e IVES, es la potencia específica vehicular (VSP por sus siglas en inglés). VSP es la potencia por unidad de peso involucrada en el movimiento del vehículo. La ecuación 6.2.7-unknown presenta el proceso de cálculo de este parámetro, el cual fue originalmente diseñado por Jimenez-Palacios (1999).
Donde,
VSP = potencia especifica vehicular (kilowatts/ton)
V = velocidad del vehículo (m/s)
A = aceleración del vehículo (m/s/s)
G = pendiente de la ruta en cambio de metros de elevación por metro de distancia en la ruta (radianes)
El modelo IVE suma la componente de carga de aire acondicionado a la ecuación 6.2.7-unknown al determinar la carga del motor para estimar emisiones. El término (1.1 *A*V) representa la demanda de potencia cinética del vehículo a medida que acelera o desacelera. El término (0.132*V) representa la demanda de potencia del roce del motor y del roce de las ruedas. El término (0.000302*V3) representa la demanda de potencia debido al roce del aire. El término (ATAN(sen(G))) representa la demanda de potencia debido a la pendiente de la ruta. La VSP puede ser positiva o negativa, dependiendo de la aceleración y la pendiente de la ruta.
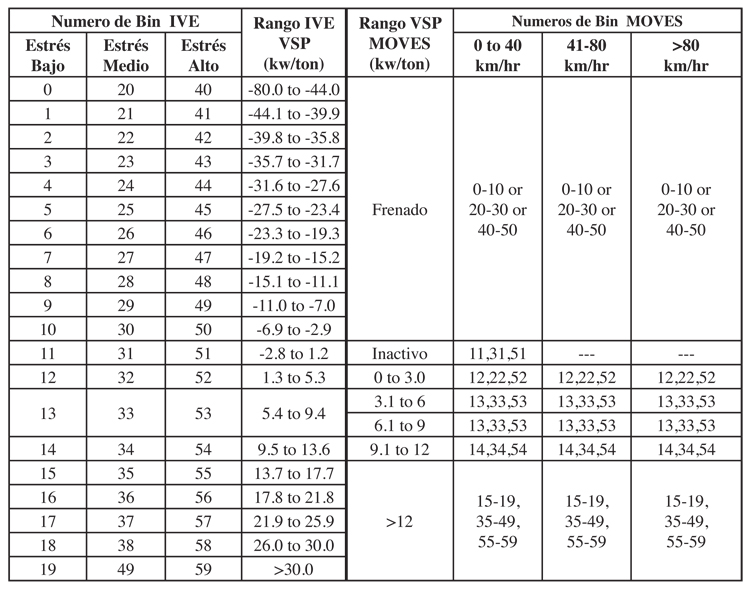
De manera de realizar los cálculos, el modelo MOVES divide la VSP en 17 bines y el modelo IVE en 60. El modelo MOVES utiliza una clasificación adicional de la velocidad del vehículo, mientras que el modelo IVE utiliza una clasificación adicional llamada Estrés. La tabla 6.2.7-3 compara las definiciones de bines para los modelos MOVES e IVE en términos del VSP. Algunas definiciones de bines no se traducen directamente entre el modelo IVE y MOVES. Se ha hecho el intento de alinearlos tanto como sea posible.
El término estrés o esfuerzo de motor al que se hace referencia en el modelo IVE se relaciona con las revoluciones del motor y el tiempo en el cual el vehículo ha estado operando a un nivel de VSP más alto. Mientras más altas sean las revoluciones y/o más alto sea el nivel de VSP durante 20 segundos antes de un evento, mayor será el nivel de estrés, y por lo tanto mayores las emisiones generadas por el motor. Las categorías de estrés están basadas en la fórmula:
Esfuerzo motor: (adimensional) = RPMIndice + (0.08 ton/kW)*PotenciaPrepromedio
donde
PotenciaPrepromedio = Promedio(VSPt=-1sec to –21 sec) (kW/ton)
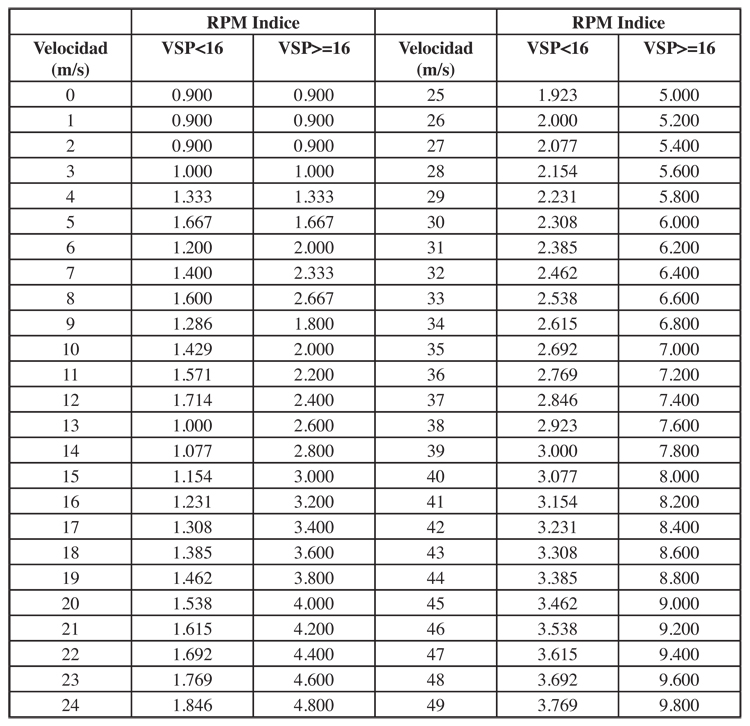
RPMIndice = está asociado con las revoluciones esperadas del vehículo, aunque no está pensado para ser un indicador exacto de las revoluciones del motor, dado que esto varía con el tipo de vehículo. La tabla 6.2.7-4 indica el índice de revoluciones basado en la velocidad del vehículo (m/s) y la demanda de VSP en el vehículo al momento de efectuar los cálculos.
Un vehículo se clasifica como categoría de estrés 1 si el valor calculado se encuentra entre 1.60 y 3.10, categoría 2 si el valor calculado está entre 3.11 y 7.80, categoría de estrés 3 si el valor calculado es mayor que 7.80.
Basado en los estudios efectuados hasta la fecha, la mayoría de la conducción se encuentra en la categoría de estrés 1 y estudios de estrés de motor en países en desarrollo no muestran conducción en la categoría de estrés 3. Solamente algunas mediciones en autopistas de los Estados Unidos han mostrado valores en la categoría de estrés 3.
En la mayoría de las situaciones las velocidades de los vehículos son medidas segundo a segundo y por ello, VSP se calcula segundo a segundo. Para tomar datos segundo a segundo de GPS y dividirlos en los 60 bines de VSP y Estrés del modelo IVE, se puede descargar el software desde el sitio web del ISSRC (http://www.issrc.org/ive).
Es posible colocar un GPS u otro equipamiento de registro de velocidad segundo a segundo en un vehículo por un período de 24 horas y registrar los movimientos del vehículo. En el caso de vehículos de pasajeros, si esto se hace para más de 50 vehículos seleccionados desde todas partes de un área de interés, el investigador debiera tener un buen conjunto de datos para establecer patrones de conducción locales. Camiones, buses y motocicletas pueden también ser medidas con equipamiento y enfoque similar para establecer sus patrones de conducción
Debido al costo del equipamiento GPS, este enfoque, si bien es viable y probablemente el preferido, no es el enfoque que normalmente se selecciona para vehículos de pasajeros. En lugar de lo anterior, a menudo tres vehículos de seguimiento se equipan con dispositivos GPS y son operados en rutas específicas siguiendo el tráfico normal desde la madrugada hasta tarde en la noche para recoger los datos necesarios. Usualmente, el área estudiada se divide en tres regiones representativas y se selecciona una carretera, arteria y calle residencial en cada región. Los vehículos son operados entonces, en cada una de las 9 calles para cada hora del día desde la madrugada hasta tarde en la noche para establecer patrones de conducción hora a hora. Con este enfoque, los patrones de conducción de una ciudad pueden ser establecidos en un período de dos semanas. Esto no quiere decir que medir más rutas y más regiones de la ciudad no sería mejor – es mejor. Sin embargo este enfoque puede ser utilizado como la opción de mínimo costo para obtener información sobre patrones de conducción para una ciudad en un periodo de tiempo relativamente corto.
Buses y camiones son típicamente tratados de forma diferente a los vehículos de pasajeros. En el caso de buses, sus pasajeros pueden ser provistos con equipos GPS portátiles y se les puede asignar una ruta de bus a recorrer. En dos semanas, tres pasajeros pueden cubrir de forma adecuada rutas durante la mayoría de horas del día para establecer patrones de conducción por hora del día. Es común equipar a un camión con equipamiento GPS durante 24 horas y que el camión recorra su ruta normal de trabajo. Es deseable medir al menos 25 camiones, lo cual puede ser logrado en un periodo de dos semanas con dos unidades GPS de registro.
La figura 6.2.7-5 ilustra los patrones de distribución de bines medidos en Nairobi, Santiago y Sao Paulo para vehículos de pasajeros utilizando el enfoque de vehículos de seguimiento.
Como se puede observar en la figura 6.2.7-5, existen diferencias entre los patrones de conducción que fueron medidos en las tres ciudades, pero también existen similitudes.
La figura 6.2.7-6 ilustra las velocidades segundo a segundo de un estudiante andando en un bus para recopilar información sobre patrones de conducción del bus.
Los patrones de conducción de buses involucran numerosas paradas como se puede observar en la figura 6.2.7-6. Estas muchas paradas y subsecuentes aceleraciones tienen un impacto significativo en las emisiones liberadas desde estos buses.
En resumen, el método más común para desarrollar información sobre patrones de conducción es utilizar un equipamiento GPS que registre velocidad, ubicación, altura y número satelital segundo a segundo. Estos datos pueden ser convertidos a un patrón de conducción promedio para su utilización en un modelo tipo CMEM o pueden ser categorizados según la potencia especifica vehicular (VSP) para ser utilizados en algún tipo de modelo como MOVES o IVE. Los conjuntos de datos de GPS pueden contener datos erróneos y se debe tener cuidado en filtrar estos errores.
Una variable crítica en la determinación de emisiones vehiculares es la forma en que los vehículos son conducidos en una ubicación de interés. Los modelos MOBILE, EMFAC y COPERT utilizan velocidades de ruta promedio para establecer patrones de conducción. Los modelos MOVES, IVE y CMEM son más flexibles al incorporar la operación de vehículos al modelo y no necesitan descansar en un grupo definido de ciclos para estimar emisiones. En lugar de lo anterior, los datos de conducción real se utilizan para predecir emisiones, y se basan en parametrizaciones de conducción específicas más que en simples velocidades promedio. En este caso, obtener la información necesaria de patrones de conducción no siempre es una tarea simple. Es posible hacer una conexión a los sistemas computacionales del vehículo y registrar como conducen. Sin embargo, las interfaces a los sistemas computacionales de los vehículos no siempre son iguales y el equipo de monitoreo puede ser caro. Un enfoque alternativo es fijar un monitor al vehículo, como el sistema de posicionamiento global (GPS) de modo de registrar las velocidades del vehículo. De manera de obtener los datos requeridos para los modelos MOVES, IVE, Guía y CMEM, al menos los datos de velocidad por segundo y de altura deben ser registrados. Existen unidades GPS que registran datos varias veces por segundo, sin embargo no se ha verificado una mejora significativa en los datos sobre mediciones segundo a segundo.
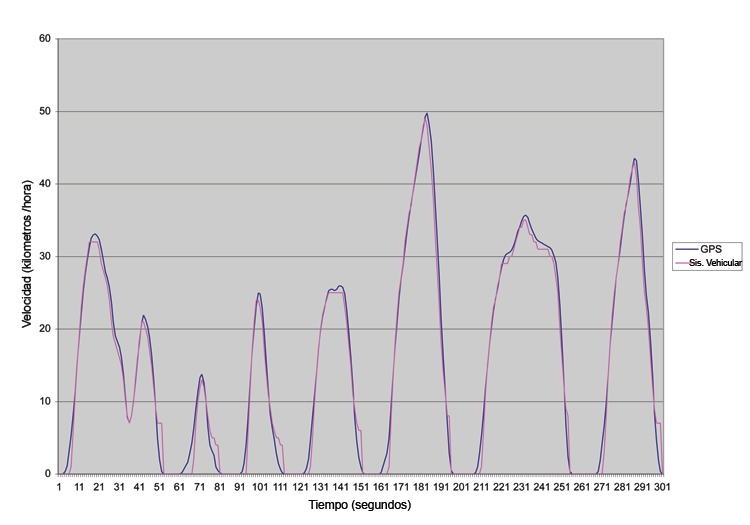
6.2.7-1 Comparación de la Velocidad Medida con Sistema de Medición de velocidad y GPS
Como se puede observar en la figura 6.2.7-1, ambos sistemas de medición concuerdan bastante bien. Las principales diferencias ocurren a velocidades bajas las cuales no son tan importantes para la determinación de emisiones.
Al analizar datos de GPS, se debe considerar un problema que existe con el uso de estos dispositivos. Una unidad GPS puede perder contacto momentáneamente con los sistemas satelitales que permiten el registro de velocidad y ubicación. Esto puede ser causado por arboles, edificios o puede ocurrir sin ninguna razón aparente. Cuando estos eventos ocurren, la unidad GPS algunas veces continúa reportando la antigua velocidad hasta que se retoma la operación correcta o hasta que la velocidad reportada sea cero. En casos donde la velocidad se vuelve cero, se registra una gran desaceleración y luego aceleración del vehículo. Similarmente, cuando la unidad GPS mantiene una velocidad previa y posteriormente la unidad se corrige, se puede registrar una aceleración o desaceleración significativa. Estas aceleraciones y desaceleraciones erróneas pueden resultar en cálculos altamente positivos o negativos de demanda de potencia del vehículo. Debido a que son poco frecuentes, estas variaciones tienden a no influenciar las velocidades promedio a menos que sean pérdidas significativas de información. En el caso de necesitar velocidades segundo a segundo, los datos del GPS deben ser examinados por estos posibles eventos anómalos antes de que sean procesados. Este examen no siempre es fácil. Un enfoque inicial es marcar todas las aceleraciones y desaceleraciones grandes y revisar los datos en forma manual. Investigadores también han desarrollado Macros para examinar utilizando Excel y otros programas para ayudar a encontrar estos eventos anómalos.
El GPS también puede proveer información acerca de la altura, la cual teóricamente puede utilizarse para determinar la pendiente de la ruta en los casos de lomas significativas. Sin embargo, se requiere gran cuidado al utilizar datos para este propósito. Los datos de altura del GPS pueden perderse mucho más que los datos de velocidad. Por ello se debe tener aún más cuidado antes de utilizar datos de altura de GPS para estimar pendientes en rutas. Es mejor desarrollar algún tipo de programa de ajuste de curvas y recopilar múltiples datos de altura del GPS a lo largo de la ruta de interés para este propósito.
6.2.7.2 Potencia Específica Vehicular
Un parámetro importante de los vehículos que se utiliza en los modelos MOVES de la EPA de los Estados Unidos e IVES, es la potencia específica vehicular (VSP por sus siglas en inglés). VSP es la potencia por unidad de peso involucrada en el movimiento del vehículo. La ecuación 6.2.7-unknown presenta el proceso de cálculo de este parámetro, el cual fue originalmente diseñado por Jimenez-Palacios (1999).

Donde,
VSP = potencia especifica vehicular (kilowatts/ton)
V = velocidad del vehículo (m/s)
A = aceleración del vehículo (m/s/s)
G = pendiente de la ruta en cambio de metros de elevación por metro de distancia en la ruta (radianes)
El modelo IVE suma la componente de carga de aire acondicionado a la ecuación 6.2.7-unknown al determinar la carga del motor para estimar emisiones. El término (1.1 *A*V) representa la demanda de potencia cinética del vehículo a medida que acelera o desacelera. El término (0.132*V) representa la demanda de potencia del roce del motor y del roce de las ruedas. El término (0.000302*V3) representa la demanda de potencia debido al roce del aire. El término (ATAN(sen(G))) representa la demanda de potencia debido a la pendiente de la ruta. La VSP puede ser positiva o negativa, dependiendo de la aceleración y la pendiente de la ruta.
De manera de realizar los cálculos, el modelo MOVES divide la VSP en 17 bines y el modelo IVE en 60. El modelo MOVES utiliza una clasificación adicional de la velocidad del vehículo, mientras que el modelo IVE utiliza una clasificación adicional llamada Estrés. La tabla 6.2.7-3 compara las definiciones de bines para los modelos MOVES e IVE en términos del VSP. Algunas definiciones de bines no se traducen directamente entre el modelo IVE y MOVES. Se ha hecho el intento de alinearlos tanto como sea posible.
El término estrés o esfuerzo de motor al que se hace referencia en el modelo IVE se relaciona con las revoluciones del motor y el tiempo en el cual el vehículo ha estado operando a un nivel de VSP más alto. Mientras más altas sean las revoluciones y/o más alto sea el nivel de VSP durante 20 segundos antes de un evento, mayor será el nivel de estrés, y por lo tanto mayores las emisiones generadas por el motor. Las categorías de estrés están basadas en la fórmula:
Esfuerzo motor: (adimensional) = RPMIndice + (0.08 ton/kW)*PotenciaPrepromedio
donde
PotenciaPrepromedio = Promedio(VSPt=-1sec to –21 sec) (kW/ton)
RPMIndice = está asociado con las revoluciones esperadas del vehículo, aunque no está pensado para ser un indicador exacto de las revoluciones del motor, dado que esto varía con el tipo de vehículo. La tabla 6.2.7-4 indica el índice de revoluciones basado en la velocidad del vehículo (m/s) y la demanda de VSP en el vehículo al momento de efectuar los cálculos.
Un vehículo se clasifica como categoría de estrés 1 si el valor calculado se encuentra entre 1.60 y 3.10, categoría 2 si el valor calculado está entre 3.11 y 7.80, categoría de estrés 3 si el valor calculado es mayor que 7.80.
Basado en los estudios efectuados hasta la fecha, la mayoría de la conducción se encuentra en la categoría de estrés 1 y estudios de estrés de motor en países en desarrollo no muestran conducción en la categoría de estrés 3. Solamente algunas mediciones en autopistas de los Estados Unidos han mostrado valores en la categoría de estrés 3.
En la mayoría de las situaciones las velocidades de los vehículos son medidas segundo a segundo y por ello, VSP se calcula segundo a segundo. Para tomar datos segundo a segundo de GPS y dividirlos en los 60 bines de VSP y Estrés del modelo IVE, se puede descargar el software desde el sitio web del ISSRC (http://www.issrc.org/ive).
Es posible colocar un GPS u otro equipamiento de registro de velocidad segundo a segundo en un vehículo por un período de 24 horas y registrar los movimientos del vehículo. En el caso de vehículos de pasajeros, si esto se hace para más de 50 vehículos seleccionados desde todas partes de un área de interés, el investigador debiera tener un buen conjunto de datos para establecer patrones de conducción locales. Camiones, buses y motocicletas pueden también ser medidas con equipamiento y enfoque similar para establecer sus patrones de conducción
Debido al costo del equipamiento GPS, este enfoque, si bien es viable y probablemente el preferido, no es el enfoque que normalmente se selecciona para vehículos de pasajeros. En lugar de lo anterior, a menudo tres vehículos de seguimiento se equipan con dispositivos GPS y son operados en rutas específicas siguiendo el tráfico normal desde la madrugada hasta tarde en la noche para recoger los datos necesarios. Usualmente, el área estudiada se divide en tres regiones representativas y se selecciona una carretera, arteria y calle residencial en cada región. Los vehículos son operados entonces, en cada una de las 9 calles para cada hora del día desde la madrugada hasta tarde en la noche para establecer patrones de conducción hora a hora. Con este enfoque, los patrones de conducción de una ciudad pueden ser establecidos en un período de dos semanas. Esto no quiere decir que medir más rutas y más regiones de la ciudad no sería mejor – es mejor. Sin embargo este enfoque puede ser utilizado como la opción de mínimo costo para obtener información sobre patrones de conducción para una ciudad en un periodo de tiempo relativamente corto.
Buses y camiones son típicamente tratados de forma diferente a los vehículos de pasajeros. En el caso de buses, sus pasajeros pueden ser provistos con equipos GPS portátiles y se les puede asignar una ruta de bus a recorrer. En dos semanas, tres pasajeros pueden cubrir de forma adecuada rutas durante la mayoría de horas del día para establecer patrones de conducción por hora del día. Es común equipar a un camión con equipamiento GPS durante 24 horas y que el camión recorra su ruta normal de trabajo. Es deseable medir al menos 25 camiones, lo cual puede ser logrado en un periodo de dos semanas con dos unidades GPS de registro.
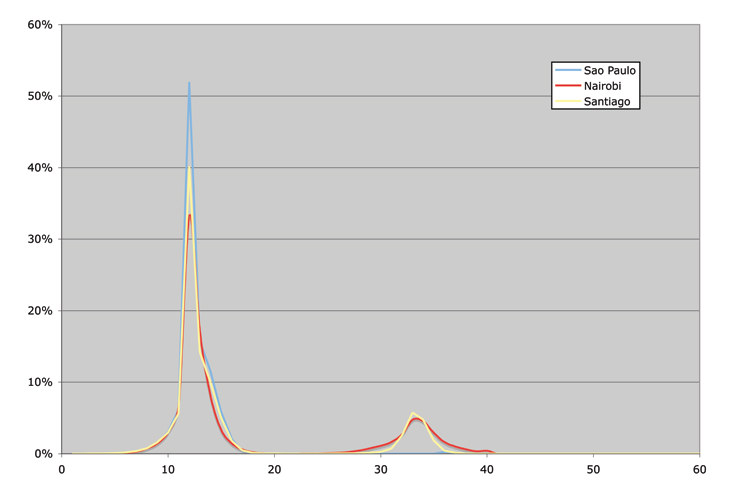
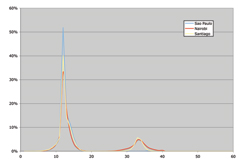
6.2.7-5 Patrones de Distribución de Bines VSP para Nairobi, Santiago y Sao Paulo
La figura 6.2.7-5 ilustra los patrones de distribución de bines medidos en Nairobi, Santiago y Sao Paulo para vehículos de pasajeros utilizando el enfoque de vehículos de seguimiento.
Como se puede observar en la figura 6.2.7-5, existen diferencias entre los patrones de conducción que fueron medidos en las tres ciudades, pero también existen similitudes.
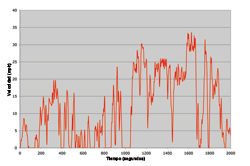
La figura 6.2.7-6 ilustra las velocidades segundo a segundo de un estudiante andando en un bus para recopilar información sobre patrones de conducción del bus.
Los patrones de conducción de buses involucran numerosas paradas como se puede observar en la figura 6.2.7-6. Estas muchas paradas y subsecuentes aceleraciones tienen un impacto significativo en las emisiones liberadas desde estos buses.
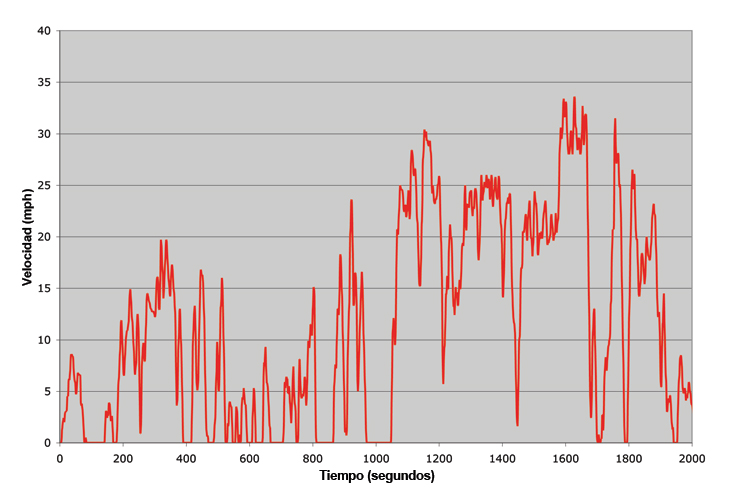
6.2.7-6 Velocidades Segundo a Segundo en buses recopiladas en Sao Paulo, Brasil
En resumen, el método más común para desarrollar información sobre patrones de conducción es utilizar un equipamiento GPS que registre velocidad, ubicación, altura y número satelital segundo a segundo. Estos datos pueden ser convertidos a un patrón de conducción promedio para su utilización en un modelo tipo CMEM o pueden ser categorizados según la potencia especifica vehicular (VSP) para ser utilizados en algún tipo de modelo como MOVES o IVE. Los conjuntos de datos de GPS pueden contener datos erróneos y se debe tener cuidado en filtrar estos errores.